
Avant de parler du module de Stärz faisons un petit rappel. Pour ceux qui connaissent déjà le principe d’une boucle de retournement vous pouvez directement passer au chapitre « Le cas spécifique du KS-PIC Z de Peter Stärz »
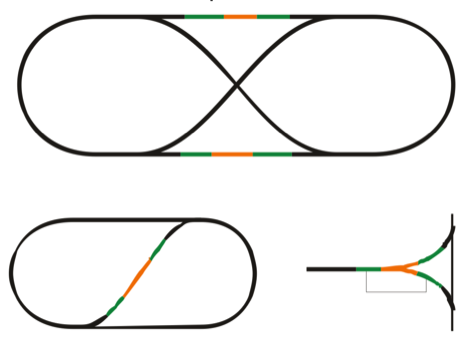
Je vais évoquer la problématique uniquement pour les réseaux équipés en numérique. Un module de retournement se justifie dans tout système de trains miniatures à 2 rails. De par le tracé de voie ont peut être amené à rencontrer des situations où l’on se retrouve face à un court-circuit si l’on connecte les rails directement. Ci-contre vous trouverez quelques configurations de voies qui nécessitent un module de retournement.
Afin de palier à ce problème il convient de créer une zone intermédiaire, complètement isolée et qui sera polarisée correctement en fonction du sens de circulation du train grâce au module de retournement afin que le train puisse traverser sans accroche cette zone.
Les 2 catégories
On peut classifier les modules de retournement en deux catégories:
Les modules de polarisation avec détection par court-circuit
Les modules de polarisation avec détection par consommation de courant
Le principe du premier type est le plus simple: inverser la polarité dès que le court-circuit apparait. Dans ce cas une seule section est nécessaire, ainsi dès que le train y entre, si le module détecte un court-circuit, il inversera la polarité de la section. Si aucun court-circuit ne se produit, cela veut dire que la section est déjà correctement polarisée, le train continue sans encombre. Quand le train arrive à la fin de la boucle, un autre court-circuit se produit. Le module rechange la polarité de la section, pour qu’elle corresponde au reste du réseau et permette la sortie du train.
Les modules Lenz LK100/LK200, Tams KSM-3, CDF 06004, par exemple, appartiennent à cette catégorie.
Avantage de ce système, le câblage est moins important (une seule section) et le prix de ces modules est souvent moins cher qu’un module de boucle de retournement sans court-circuit.
Par contre, le principe même d’attendre un court-circuit n’est techniquement pas très propre ni optimal et vous risquez de rencontrer les problèmes suivants en fonction du système numérique utilisé:
- La centrale numérique ou booster risque de disjoncter car le module ne changera pas la polarité assez rapidement. Le temps de réaction est très variable d'un fabriquant à l'autre.
- Certains décodeurs peuvent potentiellement être endommagés (bien que cela soit très rare)
- Des dégâts peuvent apparaitre au niveau des bandages des roues avant qui génèrent le court-circuit.
Les modules de polarisation avec détection par consommation de courant
Le deuxième type opère de façon plus efficiente: il y a deux zones supplémentaires (entrée/sortie de la section de polarisation, tronçons verts sur le schéma du dessus). Quand un train arrive dans la zone d’entrée, le module détecte la polarité. Il alimente alors la zone d’entrée et la section centrale avec la bonne polarité. Quand le train arrive dans la zone de sortie, le module inverse la polarité de la boucle, et alimente la zone de sortie de la même manière. Le train étant toujours dans la boucle, ce changement de polarité est quasi-instantané et invisible.
Le processus entier se passe donc sans aucun court-circuit, de façon complètement automatique. Il s’agit du moyen le plus sûr pour gérer une boucle de retournement. Ceci permet une polarisation techniquement propre de la zone commutée sans générer un court-circuit franc. Néanmoins il y a principalement deux inconvénients: il nécessite un câblage plus important du fait de ses deux sections de détection supplémentaires et un prix un peu plus élevé qu’un module de détection par court-circuit. Les modules LDT KSM-SG, Tams KSM-4 ou CDF 80120003 par exemple, appartiennent à cette catégorie.
Le cas spécifique du KS-PIC de Peter Stärz
Encore une nième présentation d’un module pour la gestion de zone de retournement? Oui et non.
-Oui dans le sens où le principe reste le même car ce module fonctionne sur le principe de détection par consommation de courant et donc offre une polarisation correcte sans court-circuit. Il nécessite donc trois sections entièrement isolées les unes des autres.
-Non car il offre la possibilité unique de pouvoir connecter indépendamment ces 3 sections à n'importe quelle entrée d'un (ou même de plusieurs) détecteurs d'occupations fonctionnant sur le principe de détection par consommation de courant. Par contre les 3 sections doivent appartenir au même booster.
La version KS-PIC WS offre un contact inverseur permanent libre de potentiel qui est commuté simultanément avec la boucle. Il peut être utilisé pour un aiguillage, un signal, un afficheur de polarité, …
Le module est disponible en kit à monter sois-même ou en version déjà montée (KS-PIC Z).
Le boitier est à commander séparément, référence G 522.
Pour toute commande voir le lien en bas de page.
En résumé voici les principaux avantages de ce module:
- Convient à tous les systèmes numériques
- Absolument sans court-circuit grâce aux 2 sections de détection
- Rétrosignalisation indépendante de chacune des 3 sections possible
- Consommation électrique minimale grâce à des relais de commutation bistables
- Relais pour commande externe (uniquement version WS)
- Pas d’alimentation externe nécessaire
- Pas de programmation nécessaire
Quelques caractéristiques techniques pour finir:
Tension d'alimentation: 12-24 V
Courant max de commutation: 3 A
Consommation du module au repos: 5 mA
Consommation du module lors de la commutation (durant env. 30 ms): 50 mA
Le mode d'emploi en français est également disponible en cliquant ici.
La référence KS-GB fonctionne comme le KS-PIC mais permet de commuter un courant permanent de 8 A, il est destiné aux trains d'échelles plus grosses comme le 1 ou le G (LGB) qui nécessitent souvent un courant plus important.
Référence: Modellbahn Digital Peter Stärz https://www.firma-staerz.de
© Y.M. mai 2020